
產(chǎn)品中心
Product Center 熱門搜索:
大氣環(huán)境走航監(jiān)測車
ZYPMMS201單顆粒氣溶膠質(zhì)譜儀
六參數(shù)微型站
高精度溫室氣體監(jiān)測系統(tǒng)
二氧化碳排放連續(xù)監(jiān)測系統(tǒng)
固定水平式機(jī)動(dòng)車尾氣遙感監(jiān)測系統(tǒng)
黑煙車電子抓拍系統(tǒng)
VOCs紅外成像儀
ZYBC201黑碳監(jiān)測儀
揮發(fā)性有機(jī)物(TVOC)監(jiān)測系統(tǒng)
便攜式VOCs氣質(zhì)聯(lián)用儀
有害氣體TDLAS技術(shù)監(jiān)測訂制
顆粒物監(jiān)測系統(tǒng)
在線VOCs檢測質(zhì)譜儀
機(jī)動(dòng)車尾氣遙感監(jiān)測系統(tǒng)
柴油車尾氣遙感監(jiān)測系統(tǒng)
熱門搜索:
大氣環(huán)境走航監(jiān)測車
ZYPMMS201單顆粒氣溶膠質(zhì)譜儀
六參數(shù)微型站
高精度溫室氣體監(jiān)測系統(tǒng)
二氧化碳排放連續(xù)監(jiān)測系統(tǒng)
固定水平式機(jī)動(dòng)車尾氣遙感監(jiān)測系統(tǒng)
黑煙車電子抓拍系統(tǒng)
VOCs紅外成像儀
ZYBC201黑碳監(jiān)測儀
揮發(fā)性有機(jī)物(TVOC)監(jiān)測系統(tǒng)
便攜式VOCs氣質(zhì)聯(lián)用儀
有害氣體TDLAS技術(shù)監(jiān)測訂制
顆粒物監(jiān)測系統(tǒng)
在線VOCs檢測質(zhì)譜儀
機(jī)動(dòng)車尾氣遙感監(jiān)測系統(tǒng)
柴油車尾氣遙感監(jiān)測系統(tǒng)
 當(dāng)前位置:首頁
當(dāng)前位置:首頁 產(chǎn)品中心揮發(fā)性有機(jī)物走航監(jiān)測車
產(chǎn)品中心揮發(fā)性有機(jī)物走航監(jiān)測車


 產(chǎn)品簡介
產(chǎn)品簡介
product
產(chǎn)品分類article
相關(guān)文章揮發(fā)性有機(jī)物走航監(jiān)測車是一種集成了高精度分析儀器、氣象監(jiān)測設(shè)備、GPS定位系統(tǒng)、無線通信模塊和數(shù)據(jù)處理平臺(tái)的智能化移動(dòng)監(jiān)測平臺(tái)。它如同一輛“移動(dòng)的實(shí)驗(yàn)室”,能夠在車輛正常行駛過程中,對(duì)沿途大氣中的揮發(fā)性有機(jī)物(VOCs)進(jìn)行實(shí)時(shí)、連續(xù)、高時(shí)空分辨率的快速監(jiān)測與溯源分析。
一、氣象參數(shù)監(jiān)測系統(tǒng)
實(shí)時(shí)測量風(fēng)速、風(fēng)向、溫度、濕度、大氣壓等關(guān)鍵氣象數(shù)據(jù),是污染溯源分析的基礎(chǔ)。風(fēng)向數(shù)據(jù)尤其重要,用于判斷污染氣團(tuán)的來向。
定位與導(dǎo)航系統(tǒng)
高精度GPS/北斗:實(shí)時(shí)記錄車輛位置、行駛速度和軌跡,實(shí)現(xiàn)監(jiān)測數(shù)據(jù)與地理位置的精確綁定。
慣性導(dǎo)航系統(tǒng)(INS):在隧道或高樓區(qū)等GPS信號(hào)弱時(shí),保證定位連續(xù)性。
數(shù)據(jù)采集與處理平臺(tái)
車載工控機(jī):運(yùn)行專用軟件,實(shí)時(shí)采集、處理、存儲(chǔ)來自各傳感器的數(shù)據(jù)。
數(shù)據(jù)融合與可視化:將VOCs濃度、氣象數(shù)據(jù)、車輛軌跡融合,在電子地圖上動(dòng)態(tài)生成污染濃度分布圖,直觀顯示污染高值區(qū)。
二、工作模式與技術(shù)特點(diǎn)
走航監(jiān)測模式:
車輛在預(yù)設(shè)路線或自由行駛,系統(tǒng)自動(dòng)采集數(shù)據(jù)。
數(shù)據(jù)以“時(shí)間-空間-濃度”三維形式呈現(xiàn),生成動(dòng)態(tài)污染分布圖。
可快速篩查工業(yè)園區(qū)、交通干道、城市功能區(qū)的VOCs污染狀況。
定點(diǎn)監(jiān)測模式:
在疑似污染源附近停車,進(jìn)行長時(shí)間定點(diǎn)監(jiān)測,分析污染物時(shí)間變化規(guī)律,輔助確認(rèn)排放特征。
應(yīng)急響應(yīng)模式:
接到異味投訴或突發(fā)事故報(bào)警后,迅速抵達(dá)現(xiàn)場,快速鎖定污染范圍和特征污染物,為應(yīng)急處置提供決策支持。
該款車型以車作為移動(dòng)載體,車上配有VOCs大氣環(huán)境檢測儀及分析評(píng)估系統(tǒng)等多種大氣檢測相關(guān)儀器。通過走航監(jiān)測對(duì)區(qū)域內(nèi)的VOCs及常規(guī)空氣六參數(shù)進(jìn)行實(shí)時(shí)監(jiān)測。整車由車體系統(tǒng)、采樣系統(tǒng)、氣象系統(tǒng)、數(shù)據(jù)匯總系統(tǒng)、數(shù)據(jù)分析系統(tǒng)和遠(yuǎn)程接收系統(tǒng)等組成,可對(duì)二氧化硫、二氧化氮、PM2.5、PM10、 一氧化碳、烴類、苯系物、醛類、酮類、酚類、脂類、惡臭有機(jī)硫化物等多項(xiàng)空氣監(jiān)測因子進(jìn)行現(xiàn)場監(jiān)測,監(jiān)測快速高效。打通“監(jiān)測”到“管治”關(guān)節(jié),滿足測管聯(lián)動(dòng)快速響應(yīng)的要求,為環(huán)境管控提供方向。例如對(duì)各種重點(diǎn)監(jiān)控對(duì)象等開展移動(dòng)監(jiān)測、配合環(huán)境執(zhí)法人員現(xiàn)場執(zhí)法監(jiān)測以及進(jìn)行環(huán)境監(jiān)控。
走航監(jiān)控軟件
軟件部分具有自動(dòng)控制、數(shù)據(jù)采集、數(shù)據(jù)分析和自動(dòng)故障診斷功能,能夠自動(dòng)升級(jí)更新。具有GIS地圖功能,走航和物質(zhì)濃度分布軌跡圖功能。


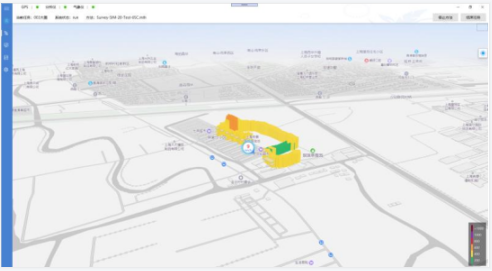
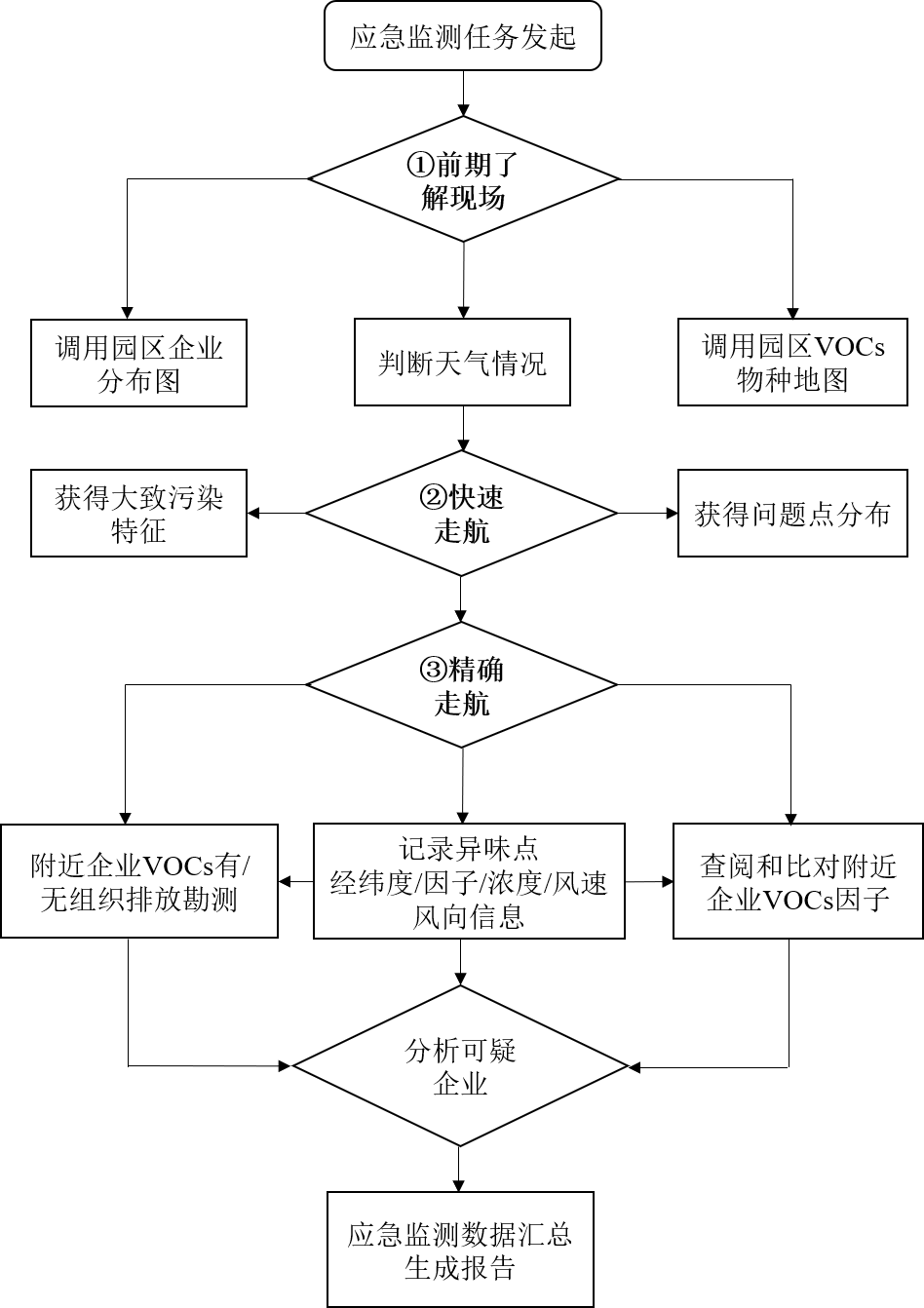
走航監(jiān)測流程示意圖
(1)通過前期現(xiàn)場了解,確認(rèn)主要走航監(jiān)測物質(zhì),選擇符合監(jiān)測能力要求的分析儀器,選擇走航監(jiān)測方案。
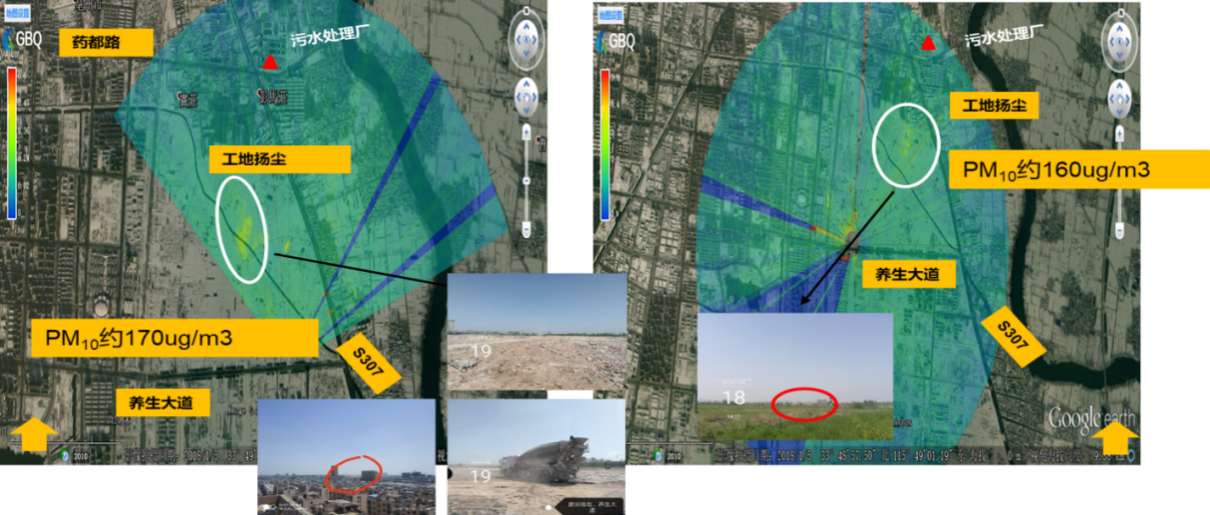
(2)結(jié)合走航車巡航速度較快的原則,前期可以在目標(biāo)園區(qū)/地區(qū)外圍快速走航一圈,給出一個(gè)區(qū)域性的VOCs‘圖像’,獲得大致的污染物特征和問題點(diǎn)分布。
(3)在后續(xù)走航過程中,根據(jù)前期結(jié)果設(shè)計(jì)精確走航路線,‘不走冤枉路’,針對(duì)重點(diǎn)位置展開反復(fù)排查。走航時(shí)根據(jù)儀器響應(yīng)時(shí)間出數(shù)后再前進(jìn),直至鎖定區(qū)域一個(gè)或者多個(gè)濃度高點(diǎn)。記錄高點(diǎn)濃度的信號(hào)強(qiáng)度、走航第幾分鐘、地理位置,當(dāng)時(shí)風(fēng)向、風(fēng)速信息。
 上一個(gè):
上一個(gè): 返回列表
返回列表
